






Нет такого водителя, который не замечал бы, хоть раз или два в день, как его коллега впереди «тупит». Скорее всего, нет и таких (только честно), кто хотя бы раз или два за всю жизнь не замечал такое за собой.
Поэтому задолго до того, как первый «автомобиль 2.0» (автомобиль без водителя) появился на дорогах, НФ-авторы прошлого века успели объяснить нам, что они будут намного эффективнее управляемых человеком — поскольку не «тупят» и поворачивают на перекрёстках тогда, когда нужно, а не когда им позволит собственная осторожность. Да мало ли таких ситуаций! Предсказано было и увеличение пропускной способности дорог, и снижение аварий.
С авариями нам сейчас всё более или менее ясно: «гугломобили» наездили без водителя свыше полумиллиона километров и в роботизированном режиме ни разу не попали в ДТП. Кстати, использовавшиеся для резервного (подстраховочного) обеспечения управления люди (профессионалы!) один раз всё же угодили в аварию, что, несомненно, говорит само за себя.
А вот как быть с увеличением пропускной способности дорог? Как определить в цифрах абстрактное «не будет тупить» в отношении робомобиля?

| Конечно, для этого автомобили придётся «подружить» между собой при помощи радиосвязи. Впрочем, такие эксперименты уже ведутся, причём полным ходом. (Здесь и ниже иллюстрации IEEE Spectrum.) |
Нет ничего проще, полагают исследователи из Колумбийского университета (США). Надо просто взять имеющееся ПО тех же «гугломобилей» и протестировать его на компьютерной модели, воспроизводящей реальные дорожные условия (число полос, стандартная продолжительность часов пик, количество машин в каждый момент времени и так далее).
Итог? Не обижайтесь, но вы — неважный водитель. Да-да, именно вы, не надо оглядываться по сторонам в поисках «чайников». На фоне авто без водителя плоховато справляется даже Михаэль Шумахер.
Полностью автономные робомобили смогут использовать существующие дороги с эффективностью в 18–19%. Это не то чтобы много: даже у бензинового двигателя КПД выше. Но в сравнении с человеком — с его «паровозными» 5% — прирост режет глаза.
Дело в том, что мы используем шоссе даже в период максимальной нагрузки не больше, чем 2 200 авто в час на полосу движения — при средней скорости в 120 км/ч и самоубийственной на такой скорости дистанции «от бампера до бампера» в 11,3 м. «Самоубийственной» — потому что в реальной жизни слишком много людей, ездящих без тормозных огней и включающих то третью вместо пятой, то вторую вместо четвёртой. И это не говоря о почти тотальном отсутствии АБС на автомобилях отечественного производства, что попросту не позволяет тормозить с должной эффективностью.
Хуже того: практический опыт и моделирование подсказывают, что после 120 км/ч пропускная способность дороги вообще не растёт, как ни поднимай среднюю скорость, потому что дистанция между машинами начинает увеличиваться не менее быстро, чем цифры на их спидометрах.
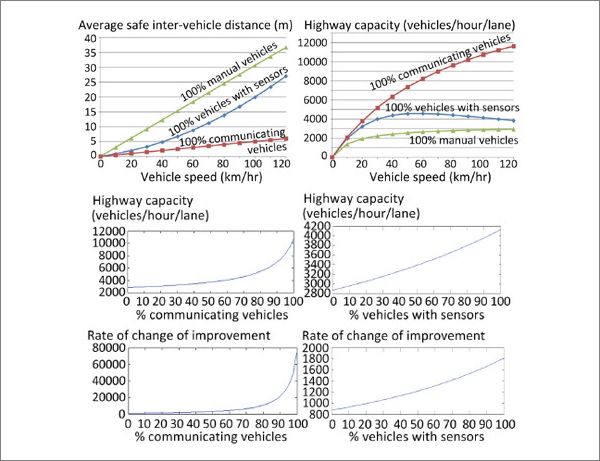
| Как видим, «человеческие» и полуавтономные авто дадут ту же пропускную способность дороги, как ни ускоряйся. А вот роботизированный автомобиль такой закономерности не демонстрирует. |
Ну а что у роботов? При полностью автоматическом режиме и активированных средствах межавтомбильной Wi-Fi-связи (да и, строго говоря, при любой радиокоммуникации) на скоростях в 120 км/ч безопасное расстояние до ближайшего бампера равно 1,8 м!
Легко догадаться, что пропускная способность вырастет — до 12 000 на полосу: в пять с половиной раз! Увы, этот показатель возможен лишь при поголовной автоматизации всех машин на трассе, чего ждать не приходится, поскольку многие неизбежно захотят управлять сами, а мы их в этом не переубедим никогда. Кроме того, «зазоры» неплохо бы несколько увеличить, хотя бы до пары метров, иначе перестроение из ряда в ряд будет несколько затруднено, особенно возле эстакад.
Однако даже частичное внедрение такого рода средств вполне может, по расчётам исследователей, повысить пропускную способность трасс на 273%.



















